
Motion Simulation: Six-Degree-of-Freedom Motion Platform
HEXAPODS–Vibration and Motion Control Platform
A hexapod robot is a robotic manipulator capable of moving a payload in all six degrees of freedom: lateral, longitudinal, vertical translation, and roll, pitch, and yaw rotation. It can move simultaneously along multiple axes or independently along a single axis while preventing movement along the other axes. Compared to other robotic manipulator architectures, the hexapod's parallel actuator arrangement provides high load capacity, stiffness, and precision.
The applications of hexapod positioning stages are generally divided into three main categories: precise positioning, motion simulation, and vibration isolation. The differences between product models lie in their drive, sensing, control systems, payload capacity, range, resolution, and bandwidth.
Hexapod systems are needed for various purposes. They can allow payloads (such as optical or laser sources) to be precisely aligned and oriented relative to another object, and even when thermal or other forms of drift continuously cause misalignment, they can simulate road conditions of vehicle suspension systems, thereby eliminating expensive field testing. Hexapod positioning stages can also isolate payloads (including cameras or sensitive measurement instruments) from ground vibrations or aircraft jitter, which would otherwise cause image blur, measurement errors, or potential damage. Other motion control devices generally only provide one or two degrees of freedom for positioning, motion simulation, or vibration isolation, but when multi-degree-of-freedom motion is required, hexapod positioning stages are the ideal solution.
Application areas (motion simulation)
Flight simulator
Missile tracker simulation
Automobile suspension system testing
Simultaneous multi-axis vibration testing
Interference sources
Cinema amusement facilities
➤ Actuators, sensors, and end-effectors optimized for applications
➤ Customizable pillar geometry and mechanical interfaces for each application
➤ Real-time controller with a 2kHz sampling rate
➤ Web browser graphical user interface
➤ Standard libraries for multi-axis control
➤ Real-time kinematics computation
➤ XML-RPC communication between host and target for easy system integration
➤ Real-time data logging
➤ Options for automatic operation and accepting remote commands
➤ Fully passive devices available for vibration isolation
➤ Vacuum compatibility options for most hexapod models
Standard and Custom Systems
Most standard hexapod cabins are used for small payloads, but the systems we offer range in size from 130mm to 3m, with load capacities between 0.5 and 15,000kg. We also build octopod cabins and systems with reduced degrees of freedom for specific applications.
Why use a six-degree-of-freedom motion platform?
➤ We have the capability to modify our standard hexapod positioning stages to meet specific customer requirements. We make HEXAPODS – vibration and motion control platforms – match the application, rather than trying to make the application match the HEXAPODS – vibration and motion control platforms.
➤ Using our traditional designs, we also manufacture custom hexapod stages to suit unique applications.
➤ We are proficient in multiple types of drives: electromechanical, electromagnetic, piezoelectric, hydraulic, and pneumatic.
➤ We have extensive experience in extreme environmental conditions: cleanrooms, vacuum, low temperature, low-temperature vacuum, and outdoor use.
➤ Our intuitive and easy-to-use graphical user interface allows the pivot point to move to any desired position.
➤ Training, installation support, and ongoing service support are provided as needed.
Hexapod Features
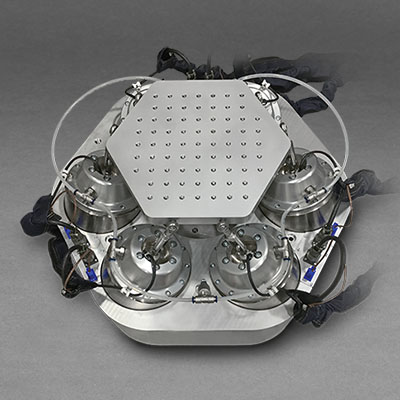
A hexapod robot consists of six legs or struts arranged in parallel between a fixed base and a moving platform. Each leg is composed of a linear actuator, one or more sensors, and joints at both ends. A controller is required to receive and interpret sensor signals and send coordinated commands to the actuator drivers to generate the desired payload motion or position. Operators typically interact with a graphical user interface on a computer to issue commands to the hexapod platform and monitor its status.
| Model | HX-M300 | HX-M350 | HX-MV500 |
| Usage | Motion simulation | Motion simulation |
Motion simulation Vibration isolation |
| Payload weight | <50 kg | <180 kg | <180 kg |
| Height | 330 mm | 330 mm | 1000 mm |
| Diameter | 564 mm | 914 mm | 2100 mm |
| Bandwidth | 150 Hz | 200 Hz | 40 Hz |
| Suspension fncyreque | NA | NA | < 5 Hz |
| Test payload weight | 3 kg | 30 kg | 90 kg |
| Model | HX-M300 | HX-M350 | HX-MV500 |
| Usage | Motion simulation | Motion simulation |
Motion simulation Vibration isolation |
| Payload | <50 kg | <180 kg | <180 kg |
| Height | 330 mm | 330 mm | 1000 mm |
| Diameter | 564 mm | 914 mm | 2100 mm |
| Range | |||
| x | ±15 mm | ±25 mm | ±45 mm |
| y | ±15 mm | ±30 mm | ±45 mm |
| z | ±12 mm | ±11 mm | ±40 mm |
| heta x | ±7 degree | ±2.5 degree | ±2.5 degree |
| theta y | ±7 degree | ±2.5 degree | ±2.5 degree |
| heta z | ±12 degree | ±6 degree | ±5.0 degree |
| Resolution | |||
| x | 1 µm | 1 µm | 50 µm |
| y | 1 µm | 1 µm | 50 µm |
| z | 0.5 µm | 0.5 µm | 25 µm |
| heta x | 5 µ radian | 2 µ radian | 35 µ radian |
| theta y | 5 µ radian | 2 µ radian | 35 µ radian |
| heta z | 7 µ radian | 5 µ radian | 35 µ radian |
| Bandwidth | 150 Hz | 200 Hz | 40 Hz |
| Suspension frequency | NA | NA | < 5 Hz |
| Test payload weight | 3 kg | 30 kg | 90 kg |
| Power | |||
| Standby | 350 W | 350 W | 200 W |
| Max | 1.5 kW | 3 kW | 1.5 kW |
| Start | Electromagnetic | Electromagnetic | Pneumatic |











