Active damping isolator
In what situations are active damping isolator used?
Do you have highly accurate, environmentally-sensitive equipment such as
➤ Improve stabilization time of moving cameras and optical devices through structural damping
➤ Reduce machine tool chatter (damping in the machine structure can prevent vibrations)
➤ Improve registration in printing processes
➤ Prevent collisions of rollers in paper mills
➤ Enhance pointing accuracy of systems with vibrating bases
➤ Reduce emission of structural noise
Do you have highly accurate, environmentally-sensitive equipment such as
microscopes, inspection equipment, imaging systems, or polishers, and the
use of active or passive isolation platforms does not meet your needs?
It may be that local/global resonance reduces the performance of the isolated
system because it is not stiff enough, or because the vibration source is located
on the component being isolated.
Based on such cases, our active damping devices can provide a solution by
introducing structural damping in most unwanted mechanical resonances.
Up to 15% structural damping can be achieved without redesign. Compared
with the passive damping, the active damping is lighter and insensitive to the
dynamic changes of the support structure.
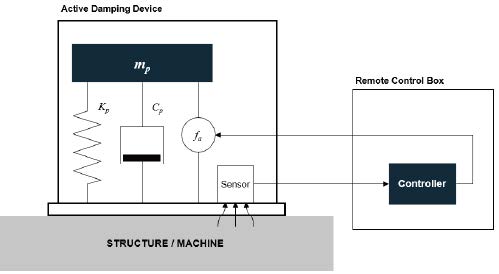
Principle
The active damper is based on the following principle: accelerating the
suspended mass generates a reaction force on the supporting structure.
Embedded sensors monitor the vibrations of the supporting structure.
Sensor readings are sent to an external feedback controller, which drives
the internal electromagnetic actuator of the active damping device.
Classic Uses
➤ Reduce structural vibrations of isolated machines (such as photolithography, microscopes, chip manufacturing, or inspection machines)Principle
The active damper is based on the following principle: accelerating the
suspended mass generates a reaction force on the supporting structure.
Embedded sensors monitor the vibrations of the supporting structure.
Sensor readings are sent to an external feedback controller, which drives
the internal electromagnetic actuator of the active damping device.
Classic Uses
➤ Improve stabilization time of moving cameras and optical devices through structural damping
➤ Reduce machine tool chatter (damping in the machine structure can prevent vibrations)
➤ Improve registration in printing processes
➤ Prevent collisions of rollers in paper mills
➤ Enhance pointing accuracy of systems with vibrating bases
➤ Reduce emission of structural noise
➤Non-destructive: Generating damping within a structure or machine with ADD is a non-intrusive process. No structural modifications are required. The ADD is simply attached to the device and adds damping. If the control is turned off, the behavior of the structure will be the same as its original behavior. Once the control is turned on again, the structural behavior remains unchanged, but resonance is reduced.
➤ Addition process: Using ADD damping is an additive process. In other words, the more ADD is applied to the structure or machine, the greater the damping achieved.
➤ Control robustness: Due to the chosen configuration of colocated sensor and actuator pairs, it can be shown that more robust and stable control schemes can be achieved, so stability is not a significant issue.
➤Low requirement for structural knowledge: Since the closed-loop damping strategy selected using DVF is very common, ADD can be applied without deep knowledge of the structure or machine it is connected to. Before using ADD to generate damping, there is no need to perform detailed preliminary modeling or structural analysis.
➤No external mechanical connection: Since it is based on inertial actuators, no external mechanical connection is required. Unlike traditional dampers that need a physical reference anchor, ADD has a virtual reference point. It is 'hooked to the sky.' Therefore, ADD can be installed on structural components that are not present or not practically connected to the ground, and can even be installed on moving parts.
➤ Wide operational bandwidth: ADD provides damping to the structures it is connected to, which is detected by the sensors. Unlike a "tuned mass damper," ADD can damp multiple modes within its operational bandwidth (usually between 25-2000Hz). It remains effective even in the presence of structural variability, such as when the positions of structural modes change for some reason, or when external disturbance sources on the structure vary. (For example, the speed range of a motor generates a varying vibration spectrum)
➤Compactness: The performance of ADD is not driven by the mass ratio between the structure and the actuator, unlike tuned mass dampers. The size of the actuator only depends on the required control force, that is, the amount of vibration energy extracted from the structure. On a 400 kg structure, an actuator of just 20 g has already achieved an impressive damping ratio.
➤ Addition process: Using ADD damping is an additive process. In other words, the more ADD is applied to the structure or machine, the greater the damping achieved.
➤ Control robustness: Due to the chosen configuration of colocated sensor and actuator pairs, it can be shown that more robust and stable control schemes can be achieved, so stability is not a significant issue.
➤Low requirement for structural knowledge: Since the closed-loop damping strategy selected using DVF is very common, ADD can be applied without deep knowledge of the structure or machine it is connected to. Before using ADD to generate damping, there is no need to perform detailed preliminary modeling or structural analysis.
➤No external mechanical connection: Since it is based on inertial actuators, no external mechanical connection is required. Unlike traditional dampers that need a physical reference anchor, ADD has a virtual reference point. It is 'hooked to the sky.' Therefore, ADD can be installed on structural components that are not present or not practically connected to the ground, and can even be installed on moving parts.
➤ Wide operational bandwidth: ADD provides damping to the structures it is connected to, which is detected by the sensors. Unlike a "tuned mass damper," ADD can damp multiple modes within its operational bandwidth (usually between 25-2000Hz). It remains effective even in the presence of structural variability, such as when the positions of structural modes change for some reason, or when external disturbance sources on the structure vary. (For example, the speed range of a motor generates a varying vibration spectrum)
➤Compactness: The performance of ADD is not driven by the mass ratio between the structure and the actuator, unlike tuned mass dampers. The size of the actuator only depends on the required control force, that is, the amount of vibration energy extracted from the structure. On a 400 kg structure, an actuator of just 20 g has already achieved an impressive damping ratio.
ADD Implementation Steps
1. Calculate based on the existing FEM model of the structure or the results of vibration response tests to assess the force required in the actuator.
2. Conduct tests involving the force generated by the existing actuator to check performance and improvements for the customer's machine or process.
3. If necessary – machine the actuator or design the controller to fit the customer's machine process.
1. Calculate based on the existing FEM model of the structure or the results of vibration response tests to assess the force required in the actuator.
2. Conduct tests involving the force generated by the existing actuator to check performance and improvements for the customer's machine or process.
3. If necessary – machine the actuator or design the controller to fit the customer's machine process.

Comparison of actuator switch effects (top is on, bottom is off)
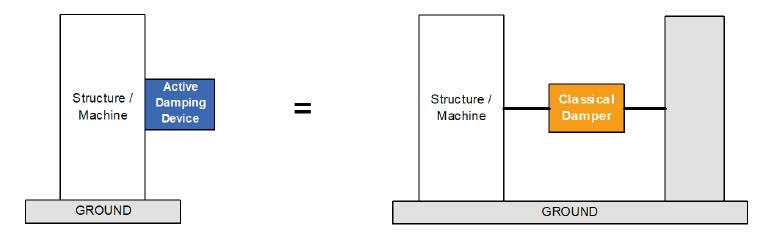
Figure 1: Active damping with an inertial actuator.
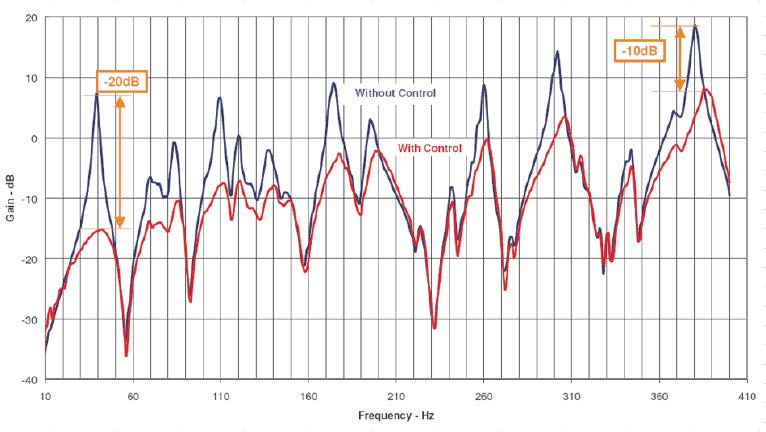
Broadband damping effect
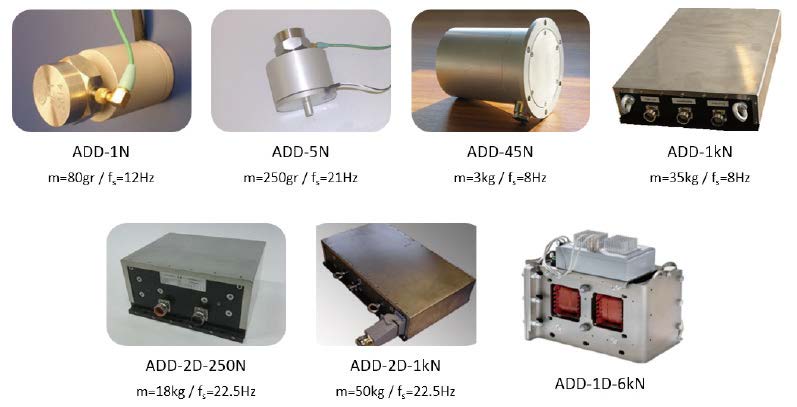
Product Gallery